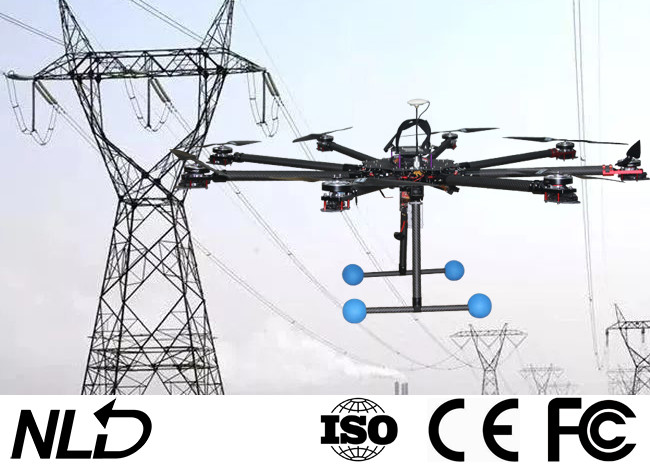
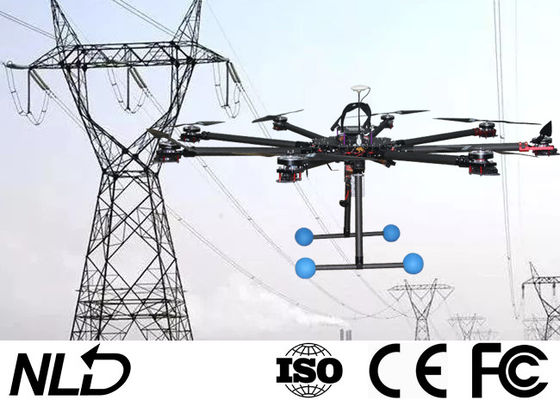
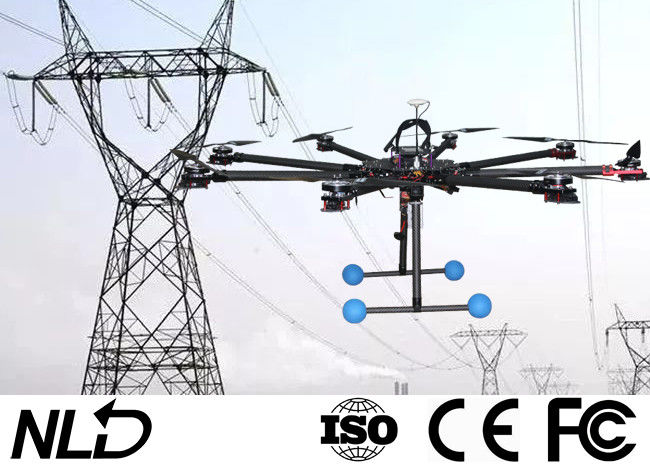
8 แกน Powerline Drone Unmanned Aerial Vehicle สำหรับการก่อสร้างสายเหนือศีรษะ Pilot Rope Traction with Rope Take-up Reel
รายละเอียดโดยย่อ:
วัสดุ: ผ้าคาร์บอน;
รีโมทคอนโทรล: 1500m;
น้ำหนักบรรทุกสูงสุด: 8kgs;
แบตเตอรี่: ลิเธียม 22.2v 16000mAh 6S *2
ข้อมูลจำเพาะ:
| วัสดุของตัวเครื่อง | คาร์บอนไฟเบอร์เต็มตัว | โหมดบินขึ้นและลงจอด | บินขึ้นและลงจอดในแนวตั้ง |
| กล้อง | ใช่ | ช่วงการควบคุมระยะไกล | ≤1.5km |
| การควบคุมการบิน+GPS | DJI-NAZA V2 | น้ำหนักเที่ยวบินสูงสุด | 8กก. |
| บรรจุุภัณฑ์ | เคสอลูมิเนียม | ประเภทแบตเตอรี่ | ลิเธียม 22.2V 16000mAh |
| อีกครั้งรีโมทคอนโทรล | ใช่ | โหลดเวลาเที่ยวบิน | 15-20 นาที |
| การแสดงภาคพื้นดิน | ใช่ | ความเร็วสูงสุดในการบิน | 14 เมตร/วินาที |
| อุณหภูมิในการทำงาน | -40 ℃—60 ℃ | ความสูงของการบินสัมพัทธ์ | 2000m |
| ที่ชาร์จ | ช่องสัญญาณคู่ | ความแม่นยำในการควบคุมการนำทางของเที่ยวบิน | แนวตั้ง 0.5m, แนวนอน 1m |
การดำเนินการ การเรียนการสอน
หมายเหตุ : ก่อนใช้งานโปรดตรวจสอบว่าอากาศดีไม่มีฝน (เครื่องนี้ไม่กันน้ำ)ปัจจัยด้านสิ่งแวดล้อม เช่น พลังงานลม อาจส่งผลต่ออายุการใช้งานแบตเตอรี่
ขั้นตอนที่ 1. ตรวจสอบว่าการติดตั้งถูกต้องหรือไม่
ข้อผิดพลาดใด ๆ ต่อไปนี้สามารถนำไปสู่อุบัติเหตุร้ายแรง:
(1) ติดตั้งใบพัดไม่ถูกต้อง
(2) เสาอากาศและขั้วต่อไม่ได้เชื่อมต่อกับร่างกายอย่างแน่นหนาหรือหลุดออก
(3) เข็มทิศถูกทำให้เป็นแม่เหล็ก
ตรวจสอบให้แน่ใจว่าร่างกายอยู่ในสภาพดี:
1. สถานการณ์ GPS อยู่ในเกณฑ์ดี (มีสัญญาณดาวเทียมมากกว่า 7 ดวงขึ้น)
2. การเชื่อมต่อทั้งหมดถูกต้องและอยู่ในสภาพดี
3. ตรวจสอบว่าใบพัดแน่นหรือไม่ (แต่อย่าขันมากเกินไป) และติดตั้งใบพัดอย่างถูกต้อง
4. ว่าแบตเตอรี่ รีโมทคอนโทรล แบตเตอรี่พลังงาน และโทรศัพท์มือถือเพียงพอหรือไม่
5, ที่นั่งมอเตอร์ลำตัวและเกียร์ลงจอดที่มีหรือไม่มีร่องรอยของการแตกร้าว
6. ไม่มีเศษซากที่เห็นได้ชัดภายในมอเตอร์ถ้าเป็นเช่นนั้นก็ควรที่จะลบออกในเวลา
7. ไม่ว่าพื้นผิวของใบพัดจะเสียหายอย่างเห็นได้ชัดหรือไม่ และไม่มีการลื่นบนพื้นผิวของสกรู
8, ลำดับการบูต: เปิดไฟควบคุมระยะไกลก่อนจากนั้นเปิดเครื่องเครื่องบิน
9. ลำดับการปิดระบบ: ถอดสายไฟของเครื่องบินออกก่อนแล้วจึงปิดสวิตช์ของรีโมตคอนโทรล
ขั้นตอนที่ 2 ปรับเทียบเข็มทิศและบันทึกจุดส่งกลับ
จดจำ:
(1) โปรดอย่าปรับเทียบในบริเวณที่มีวัสดุที่เป็นเฟอร์โรแมกเนติก เช่น เหมืองแม่เหล็ก ลานจอดรถ และพื้นที่อาคารที่มีการเสริมแรงใต้ดิน
(2) ห้ามพกพาสารที่เป็นแม่เหล็ก เช่น กุญแจ โทรศัพท์มือถือ ฯลฯ ขณะทำการปรับเทียบ
(3) โมดูลเข็มทิศไม่สามารถทำงานได้ตามปกติในอาร์กติกเซอร์เคิล
(4) การปรับเทียบเข็มทิศมีความสำคัญมาก ไม่เช่นนั้นระบบจะทำงานไม่ถูกต้อง
ขั้นตอน:
1. เลือกตำแหน่งจุด takeoff แบบเปิดโล่งและได้มุมมองที่ดี
2. เปิดปีกพับโดรนให้อยู่ในสถานะเปิดแล้วล็อค คลายสกรูที่ด้านบนของโครงยึด แล้วเปิดโครงยึดแล้วยึดด้วยสกรู
3. เปิดสวิตช์ของรีโมทคอนโทรลและสวิตช์บนหน้าจอตรวจสอบว่าหน้าจอแสดง 4 "0" (หากไม่ใช่ ให้ปรับเป็น 0)เสาอากาศของรีโมทคอนโทรลควรขนานกับรีโมทคอนโทรล
4. โดรนเชื่อมต่อกับแบตเตอรี่และเชื่อมต่อกับแหล่งจ่ายไฟระบบควบคุมการบิน
5. เข็มทิศสอบเทียบ: ไฟล์ F อย่างรวดเร็ว 3-5 ครั้งขึ้นและลงจนกว่าไฟแสดงสถานะ LED ของโดรนจะติดสว่าง เข้าสู่โหมดการปรับเทียบ
6. บันทึกจุดส่งกลับ:
①แนวนอน (รูปที่ 1): ผู้ปฏิบัติงานหยิบโดรนขึ้นและหมุน 360 องศาในแนวนอนเป็น 1-2.5 รอบ (ให้มากที่สุดเท่าที่จะเป็นไปได้เพื่อให้ทิศทางศีรษะขนานกับพื้น) จนกระทั่งไฟ LED เปลี่ยนเป็นสีเขียว

②แนวตั้ง (รูปที่ 2): ผู้ปฏิบัติงานหยิบโดรนขึ้นและหมุนแนวนอน 360 องศาเป็น 1-2.5 รอบ (ให้ศีรษะตั้งฉากกับพื้นให้มากที่สุด) จนกระทั่งไฟ LED เปลี่ยนเป็นสีเขียว
7. รอจนกว่าไฟ LED สีเขียวจะกะพริบและไฟสีเขียวจะกะพริบช้าๆ ก่อนปิดเครื่อง(หากการปรับเทียบล้มเหลวและไฟสีแดงยังคงกะพริบอยู่ ให้กลับไปที่ขั้นตอนที่ 5 เพื่อปรับเทียบใหม่)
การประชุมเชิงปฏิบัติการ:
หยิบม้วน
 ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร!
ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร!